WalCycData, funded by EIT Urban Mobility
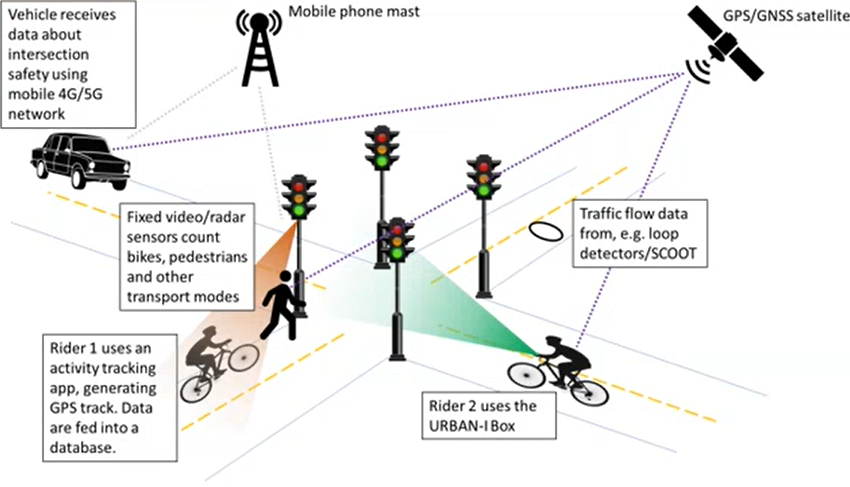
Increasing the safety of vulnerable road users – cyclists and pedestrians. The goal of this international consortium is to test in pilot cities Munich and Ostrava the URBAN-i Box, developed in UCL, which is a multi-sensor technology positioned on bicycles that monitors the interaction of cyclists, pedestrians, and cars in a dynamic urban environment through – among others – video and GNSS. The project includes the creation of a digital infrastructure based on UPC’s CIGO! system, for data evaluation and analysis of crisis situations or accidents, including the creation of communication platform between cars, pedestrians, cyclists, and other digital infrastructures.
The consortium includes University College London (UK), Pompeu Fabra University (E), Technical University of Catalonia (E), Technion – Israel Institute of Technology (IL), Fraunhofer Society for the Advancement of Applied Research (D) and Škoda Auto (CZ).
BIKE-LONGER, funded by EIT Urban Mobility
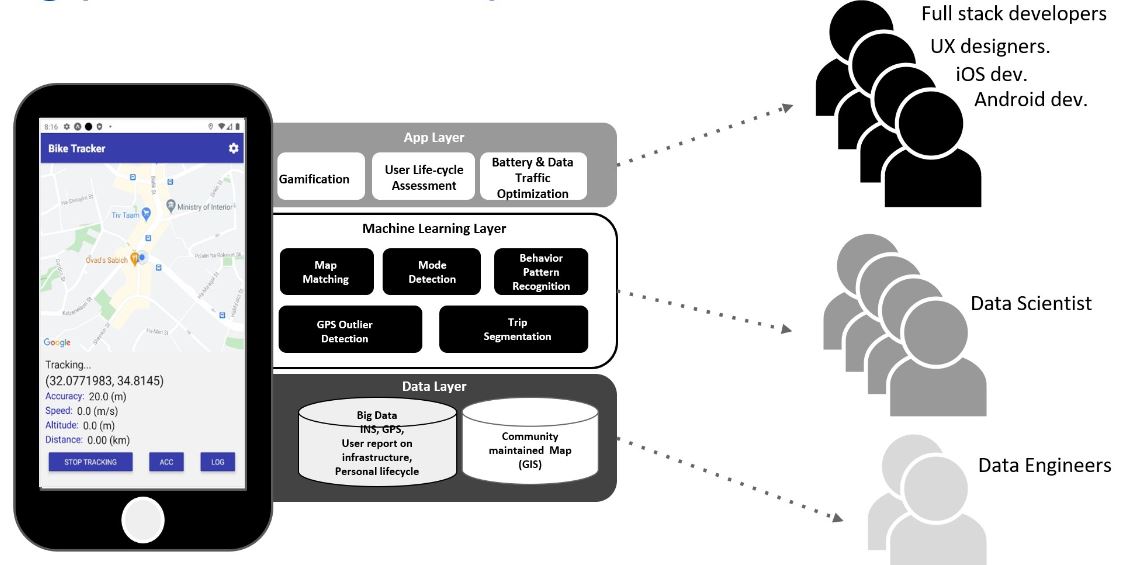
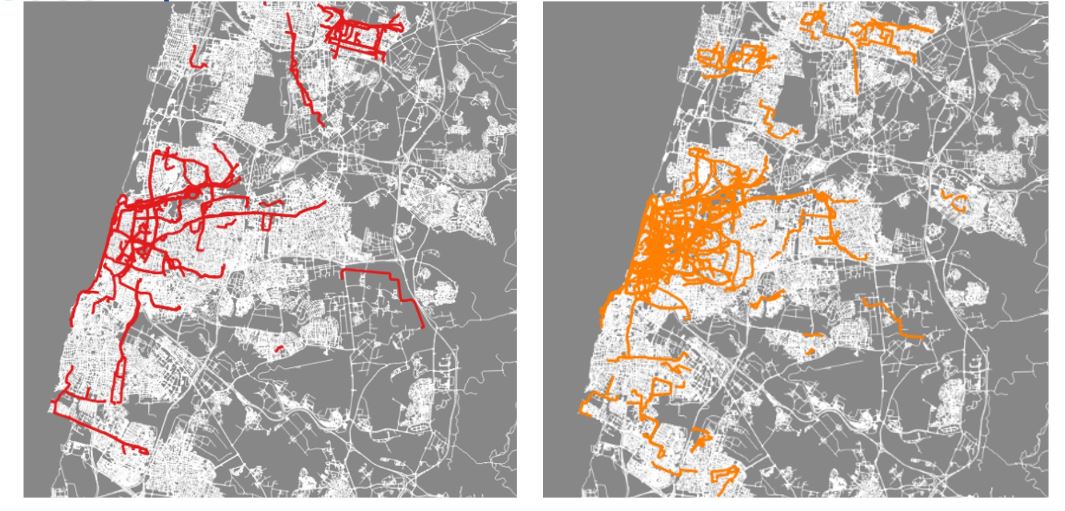
Bicycles and e-bikes are generally under prioritized or completely overlooked in strategic transport models used in city-level mobility planning. The BIKE-LONGER research project will provide a data foundation and methodological protocols needed for quantitative analysis of bicycle user behaviour and preferences to support the policies of better bicycle investments in urban areas to contribute to the vitality of the city and to sustainable urban growth.
BIKE-LONGER will provide an efficient and reliable application and computational services for bicycle and e-bike data collection and analysis that mainly relies on user-generated crowdsourced data, collected passively and actively by users.
This research project is a collaboration of The Tehcnion and the Technical University of Denmark (DTU), together with the cities of Copenhagen and Tel-Aviv.
https://www.eiturbanmobility.eu/projects/bike-longer/
BlindNav, funded by the Israel Innovation Technology (Assistive Technologies)
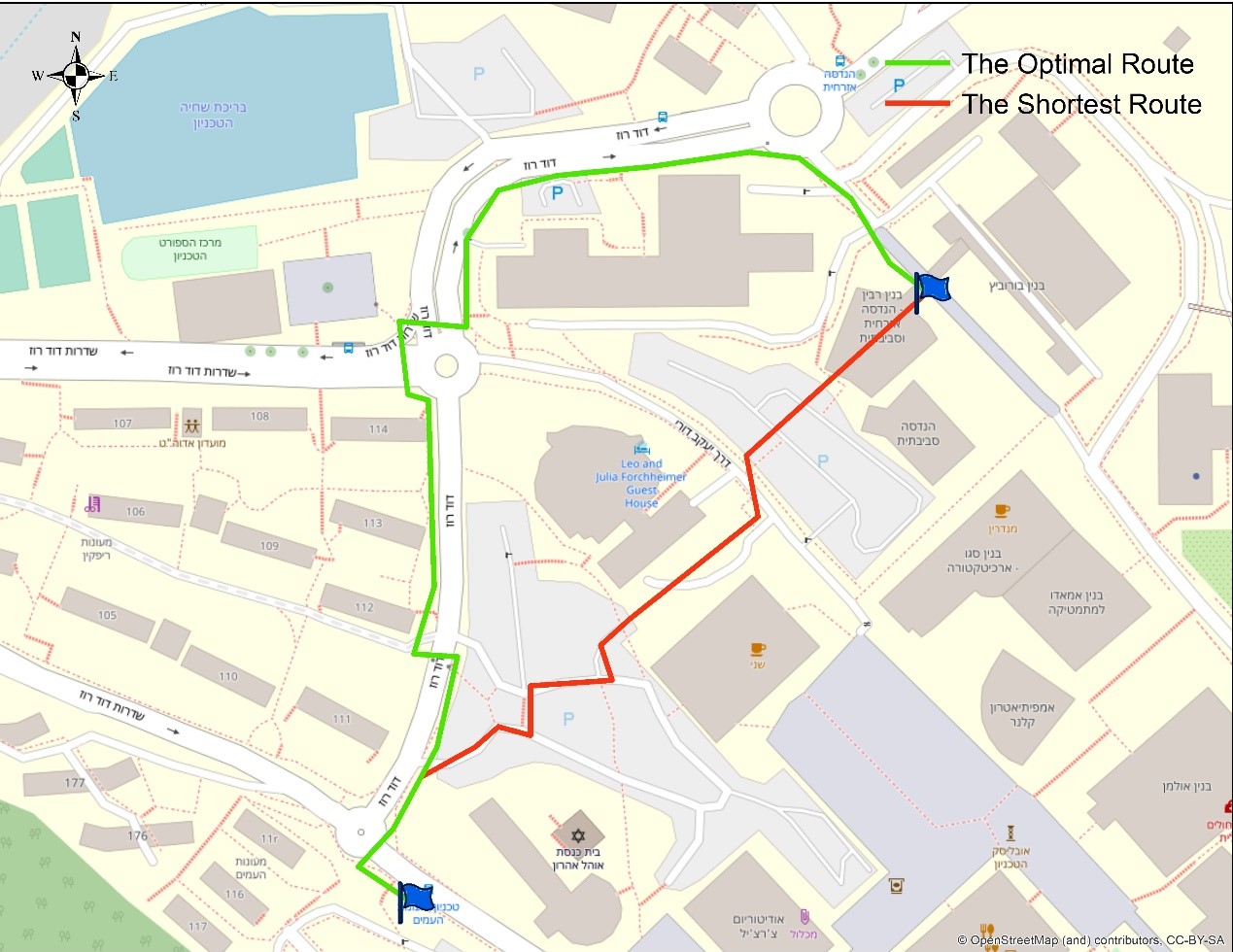
The use of smartphones in the blind population has led to the development of accessible applications, for example: voice information about existing obstacles in the immediate vicinity, and location and information about public transportation. As much as these technologies help and contribute to this population, they still provide a limited solution. The purpose of BlindNav is to develop an assistive navigation application, which combines route planning designed for blind pedestrians, one that is safe, accessible and easy to walk, and an accurate localization, which will allow reliable navigation and orientation.
The route planning algorithm is based on open-source geographic information layers (OpenStreetMap), reflecting spatial and environmental considerations and constraints that affect optimal route planning. This combined with high-precision GNSS-based positioning with real-time kinematic capability (RTK).
Increasing the mobility capabilities of bind pedestrians holds a great potential for increasing their independence and integrating them in the society.
This research is a collaboration with Migdal Or, a multi-service center dedicated to advancing people with blindness or visual impairment towards independent functioning and inclusion in the workplace.

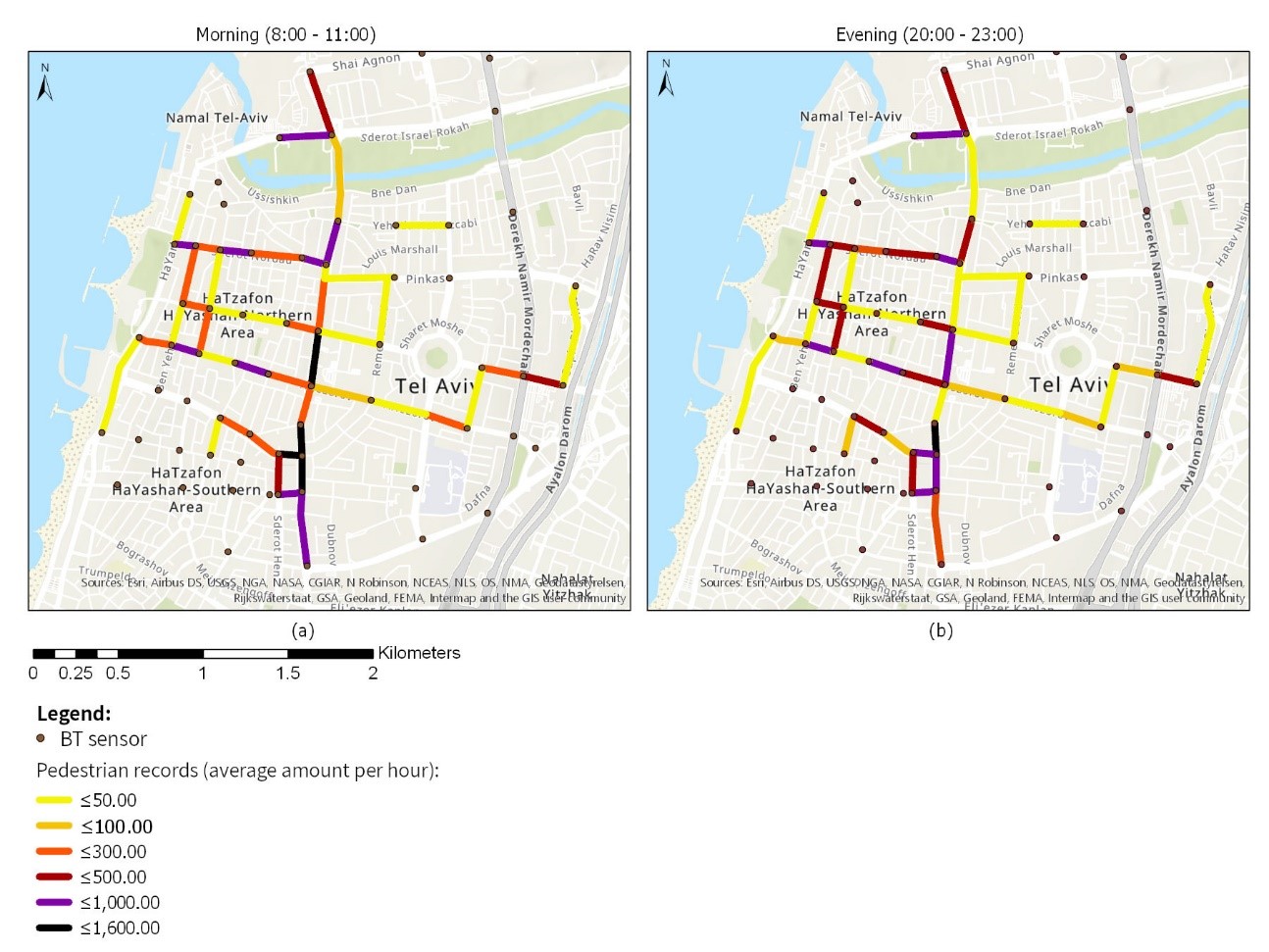
PedBT-Covid19, funded by The Israeli Center for Promoting Research in Smart Transportation
This research project aims to develop and evaluate a methodology to showcase the feasibility of using a large-scale Bluetooth sensor system, which is used for motorized-transportation monitoring, for pedestrian identification and flow quantification. The methodology will be tested by exploring and analyzing pedestrian walking patterns and traffic during COVID-19 quarantine and exit-quarantine policy in Tel-Aviv.
Comparing the various pedestrian traffic flow will enable to assess and explore the impact of quarantine policies on pedestrian traffic in the urban space, both on global and local scales. As a second wave of the epidemic already occurs, this study is of immediate importance since it may provide insights on pedestrian mobility in an urban area for decision and policy makers.
This research is a collaboration with the Faculty of Architecture and Town Planning, The Technion.